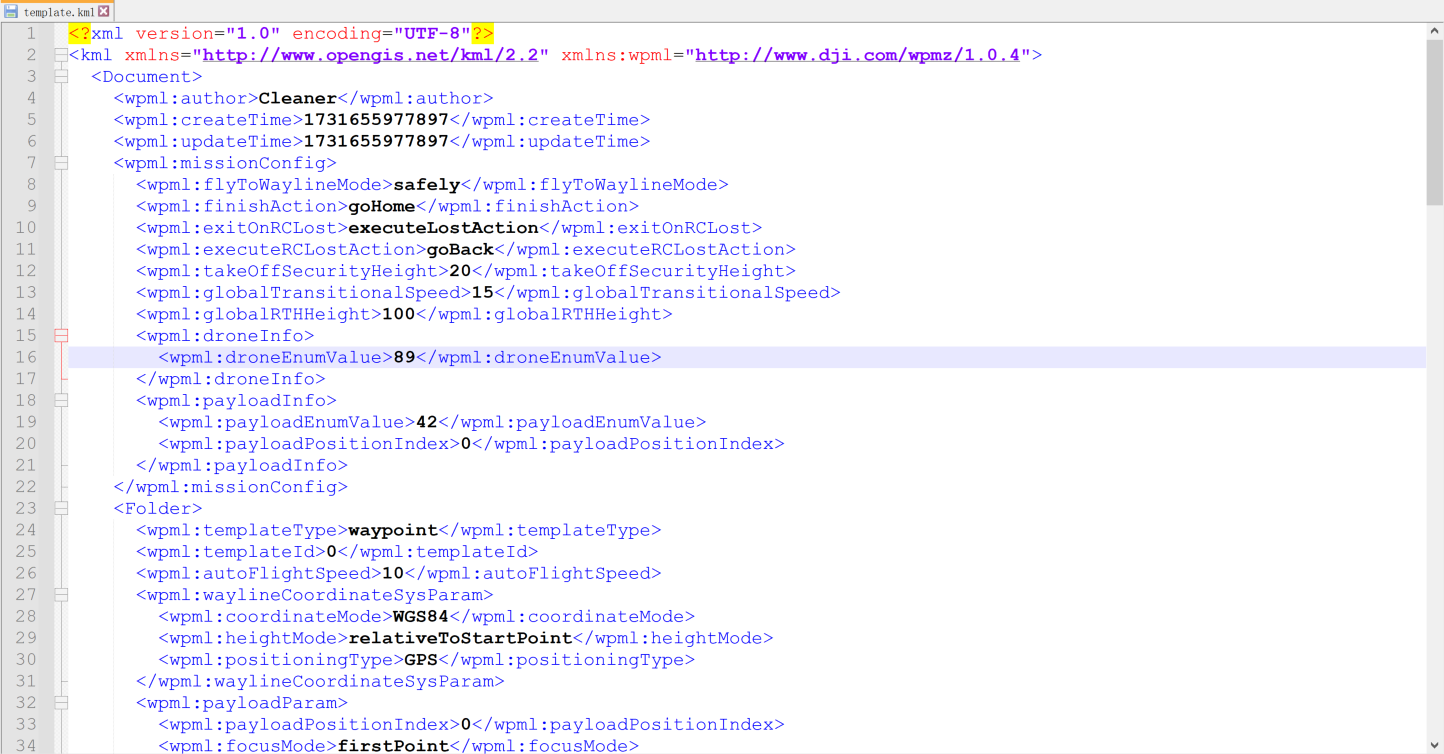
基于大疆最新航线文件格式标准 v1.11.3 版本开发,生成符合大疆标准的 KMZ 航线文件,可直接导入到 DJI Pilot 2 或机场等地面站软件中使用。 用户可以根据实际飞行需求,灵活配置各种航线参数,包括:
- 航线结束动作: 自定义航线飞行结束后无人机的行为(例如:悬停、返航、降落)。
- 失控动作: 设置无人机在失去遥控信号时的应对措施(例如:自动返航、悬停)。
- 飞行高度和速度: 精确控制航线飞行的高度和速度,确保飞行安全和效率。
- 航点转弯模式: 选择合适的转弯方式(例如:直线飞行、曲线飞行),优化飞行轨迹。
- 偏航角模式: 控制无人机在航点之间的偏航角度,满足不同的拍摄需求。
- 航点动作: 为每个航点单独设置动作,例如拍照、录像、悬停等,实现复杂的飞行任务。
支持解析已有的 KMZ 航线文件,方便用户导入、查看和编辑航线数据,提高航线管理的效率和灵活性。
提供结构清晰、注释完善完整的 Demo 代码,帮助用户快速上手,进行二次开发。
- file/kmz:存放生成的 KMZ 文件
- domain/kml:XStream 注解的 Java Bean
- domain/*.Req:前端请求参数对象
- enums:航线文件元素标签取值枚举
- util/RouteFileUtils:生成和解析 KMZ 航线文件的代码都在这个工具类里
{
"droneType": 89,
"payloadType": 81,
"payloadPosition": 0,
"imageFormat": "ir,zoom",
"finishAction": "goHome",
"exitOnRcLostAction": "goBack",
"globalHeight": 100,
"autoFlightSpeed": 10,
"waypointHeadingReq": {
"waypointHeadingMode": "followWayline"
},
"waypointTurnReq": {
"waypointTurnMode": "toPointAndStopWithDiscontinuityCurvature"
},
"gimbalPitchMode": "usePointSetting",
"routePointList": [
{
"routePointIndex": 1,
"longitude": 123.45,
"latitude": 34.56,
"actions": [
{
"actionIndex": 1,
"hoverTime": 10
},
{
"actionIndex": 2,
"zoom": 20
}
]
},
{
"routePointIndex": 2,
"longitude": 123.45,
"latitude": 34.56
},
{
"routePointIndex": 3,
"longitude": 123.45,
"latitude": 34.56
}
]
}
{
"finishAction": "autoLand",
"exitOnRcLostAction": "landing",
"routePointList": [
{
"routePointIndex": 1,
"longitude": 123.45,
"latitude": 34.56,
"actions": [
{
"actionIndex": 1,
"hoverTime": 10
},
{
"actionIndex": 2,
"zoom": 20
}
]
},
{
"routePointIndex": 2,
"longitude": 123.45,
"latitude": 34.56
},
{
"routePointIndex": 3,
"longitude": 123.45,
"latitude": 34.56,
"actions": [
{
"actionIndex": 1,
"hoverTime": 10
},
{
"actionIndex": 2,
"zoom": 30
}
]
}
]
}- 支持生成和解析建图航拍、倾斜摄影、航带飞行模板类型的 KMZ 文件。